CK3M és CK5M
Programozható többtengelyes vezérlő
A leggyorsabb, 50 µs/5 tengelyes szervociklusidővel ellátott többtengelyes szabályozó precíziós megmunkálást tesz lehetővé
- Helyi tengelyek a nano-precízióért
- Ultra nagy sebességű szinkronizált vezérlés (50µs/5 tengely)
- Egyedi szervo szabályozást szolgáló algoritmus
- Rugalmasság más gyártók működtetőelemeinek és jeladóinak használata esetén
- Rugalmasság G-kódon, ANSI C-n vagy eredeti programnyelveken történő programozás esetén
- EtherCAT a rugalmas konfigurációhoz
- Moduláris felépítés és DIN-sínre szerelhetőség
Specifikáció és rendelési információ
| Termékek | Type of module | CPU clock frequency | Max. number of axes via EtherCAT | Max. number of axis interface units | Amplifier interface | Encoder interface | Digital output type | Number of digital inputs | Number of digital outputs | Number of analog inputs | Leírás | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
CK3M Motion Control CPU | 1.0 GHz | 0 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, No EtherCAT. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 4 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, 4 EtherCAT axes. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 8 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, 8 EtherCAT axes. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
Analog I/O | 4 | CK3W Analog IN, 4 points, +/-10 V, 16 bit (full scale) |
|
||||||||
|
|
Analog I/O | 8 | CK3W Analog IN, 8 points, +/-10 V, 16 bit (full scale) |
|
||||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, Digital encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, Digital encoder, DirectPWM, PNP |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, DA output (Filtered PWM), Pulse + direction or phase difference, Pulse encoder / Serial encoder, NPN Output type |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, DA output (Filtered PWM), Pulse + direction or phase difference, Pulse encoder / Serial encoder, PNP Output type |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, DA output (True DAC), Pulse + direction or phase difference, Pulse encoder / Serial encoder, NPN Output type |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, DA output (True DAC), Pulse + direction or phase difference, Pulse encoder / Serial encoder, PNP Output type |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | NPN | CK3W 4 Axis Interface Unit, Sinusoidal encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | PNP | CK3W 4 Axis Interface Unit, Sinusoidal encoder, DirectPWM, PNP |
|
||||||
|
|
Encoder input | Not Applicable | Special Serial Protocol | Encoder Input Unit for CK3M, Serial encoder 4 channels, BiSS-C, Endat2.2, and R88M-1Lx/-1Mx Motor built-in encoder |
|
|||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, XY2-100 | Laser Interface Unit for CK3M, XY2-100 Protocol, Laser PWM output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, TCR, XY2-100 | Laser Interface Unit for CK3M, XY2-100 Protocol, Laser PWM output and TCR Output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100 | Laser Interface Unit for CK3M, SL2-100 Protocol, Laser PWM output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100, TCR | Laser Interface Unit for CK3M, SL2-100 Protocol, Laser PWM output and TCR Output |
|
||||||
|
|
Digital I/O | NPN | 16 | 16 | CK3W Digital IO, IN/OUT:16/16, NPN |
|
||||||
|
|
Digital I/O | PNP | 16 | 16 | CK3W Digital IO, IN/OUT:16/16, PNP |
|
||||||
|
|
CK5M Motion Control CPU | 1.6 GHz | 16 | 8 | 0 | 0 | 0 | CK5M Quad Core 1040 CPU, 2 GB RAM, 4 GB Flash, 16 EtherCAT axes. Up to 8 axis interface units can be connected via Expansion units, max 32 axis local. |
|
|||
|
|
CK5M Motion Control CPU | 1.6 GHz | 32 | 8 | 0 | 0 | 0 | CK5M Quad Core 1040 CPU, 2 GB RAM, 4 GB Flash, 32 EtherCAT axes. Up to 8 axis interface units can be connected via Expansion units, max 32 axis local. |
|
Miben segíthetünk?
Ha kérdése van, vagy árajánlatot szeretne kérni, vegye fel velünk a kapcsolatot, vagy küldjön kérelmet.
Vegyék fel velem a kapcsolatot CK3M és CK5M

Köszönjük megkeresését. Hamarosan kapcsolatba lépünk Önnel.
Műszaki hiba lépett fel. Az űrlap adatai nem kerültek feldolgozásra. Elnézést kérünk ezért, kérjük próbálja meg később ismét. Részletek:[details]
DownloadIdézet a következőre: CK3M és CK5M
Az alábbi űrlap kitöltésével kérhet ajánlatot kiválasztott termékeinkről. A *-gal jelölt mezőket kérjük kitölteni. Adatait bizalmasan kezeljük.
Köszönjük érdeklődését. Hamarosan továbbítjuk Önnek a kért információt.
Műszaki hiba lépett fel. Az űrlap adatai nem kerültek feldolgozásra. Elnézést kérünk ezért, kérjük próbálja meg később ismét. Részletek:[details]
DownloadKépességek

Moduláris felépítés
A moduláris felépítés lehetővé teszi a CK3M szabad kombinálását akár két axiális interfész egységgel, így számos alkalmazhatóság lehetséges.
Power PMAC IDE (integrált fejlesztői környezet)
- A Microsoft® Visual Studio®-n alapul
- ANSI C vagy eredti programnyelv
- Egyszerű hangolás
- Egyszerű beállítás
- Hibaelhárítás
- Hibakereső
Összetett kinematika
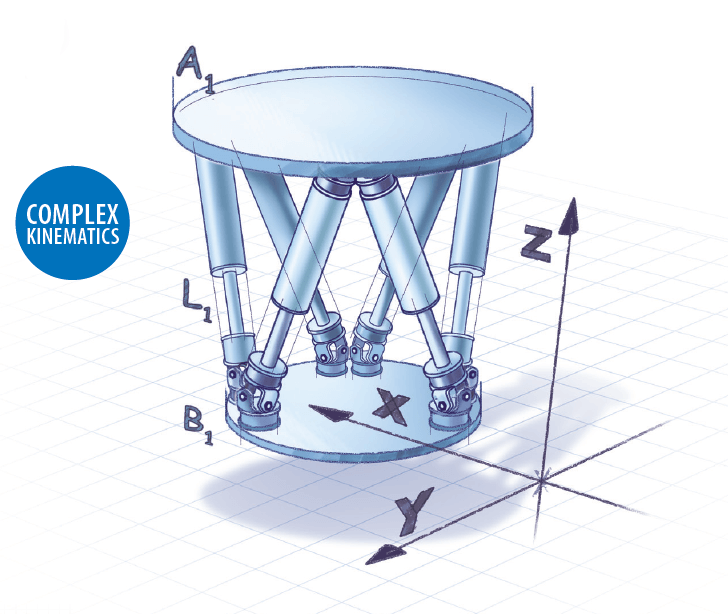
Lehetőség van az összetett mechanika vezérlésére a mátrixkezelésnek és a helyátalakításnak köszönhetően. A kinematika kezelési funkcionalitásának köszönhetően egyszerűen használhatók olyan különleges alkalmazások, mint a Hexapod teleszkóptükör-elhelyezés.
Emelési funkciók a pontos gépi alkalmazáshoz
G-kód
Standard RS-274 G-kód értelmező. Felhasználó által írható szubrutinok a G-, M-, T- és D-kódok testreszabott implementálásához. Rugalmasság a szintaktika alkalmazásáért, valamint a bármilyen CAD/CAM szoftverrel történő együttműködés érdekében.
2D/3D vágáskompenzálás
Szerszámátmérő- és szerszámkorrekció, pontosan illeszkedve a G-kód által meghatározott vágási pontra.
Gyors processzor + nagy programpuffer
A gyors processzor másodpercenként több mint 10 000 blokk kezelésére, valamint akár 1 GB-os részprogramok kezelésére képes.
Blokkvisszahozás az útvonal megfordításához
Megfordítható az útvonal az eszköz vágási területről történő eltávolításához.
Fejlett „Lookahead” funkció
Előre megtörténik a pufferutasítások elemzése, valamint a jobb teljesítmény érdekében biztosítja a mozdulatok zökkenőmentességét, optimális sebességét és optimális gyorsulását.
Tangens eszközkezelés
A vágásiránnyal rendelkező eszközöknek tangens útvonal-elhelyezésre van szükségük.
Szoftver
PMAC IDE teljesítmény
Ezzel a számítógépszoftverrel lehetőség van a felhasználói programok konfigurálására, létrehozására, valamint a hibaelhárításra az NY51-A és CK3E Programozható többtengelyes egyetemes gépvezérlők számára.
Kapcsolódó termékek
-

Sysmac általános célú szervo
-

CK3E programozható többtengelyes szabályozó
-

Teljesítmény és praktikum a gépvezérlésben
Gépkönyvek, adatlapok, letöltések









_getting_started_guide_en.jpg)